
NUS develops 3D-printed reconfigurable robotic grippers
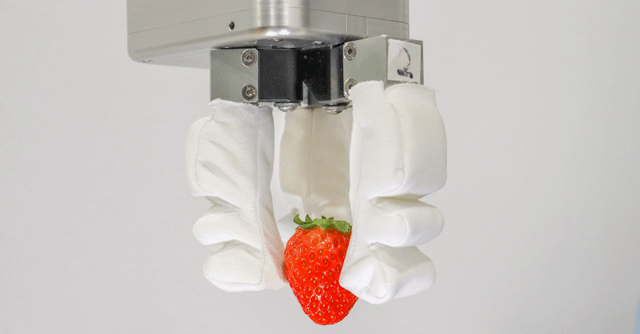
The National University of Singapore (NUS) has developed hybrid robotic grippers, which it claims can impact a range of industries such as food assembly, vertical farming and fast-moving consumer goods packaging, etc. Consisting of three or four soft fingers, the hybrid robotic grippers use soft, flexible 3D-printed fingers with a reconfigurable gripper base. The university claims that the fingers are air-driven and equipped with a novel locking mechanism for adjustable stiffness.
“Gripping is one of the most common and natural tasks that people perform, but for robots, it is not as intuitive. To achieve human-like gripping abilities, robots need computer vision and deep learning to detect the type of objects in front of them as well as their orientation. The gripper can then automatically decide on how best to pick and place objects to minimise the necessity of intensive human intervention,” NUS said in the official release.
Also read: Indian firms are turning to 3D printing to build houses for individuals, businesses
Led by Associate Professor Raye Yeow from the NUS Department of Biomedical Engineering and the NUS Advanced Robotics Centre, the project is now in the process of being brought to commercial partners under the team’s start-up RoPlus (RO+), comprising NUS researchers Low Jin Huat, Khin Phone May, Chen Chao-Yu and undergraduate student Han Qian Qian
“An object’s shape, texture, weight and size affect how we choose to grip them. This is one of the main reasons why many industries still heavily rely on human labour to package and handle delicate items,” Assoc Prof. Yeow said, adding that our hybrid robotic gripper technology revolutionises traditional pick-and-place tasks by offering advanced capabilities that allow robots to safely interact with delicate items of various shapes, sizes and stiffness, just like the human hand.
The NUS team has developed three types of hybrid robotic gripper systems which are: a) Gourmet Grip, b) UnisoGrip, or Universal Soft Gripper, c) GourmetGrip/UnisoGrip platforms derived customisable gripper (unnamed).
Next Article